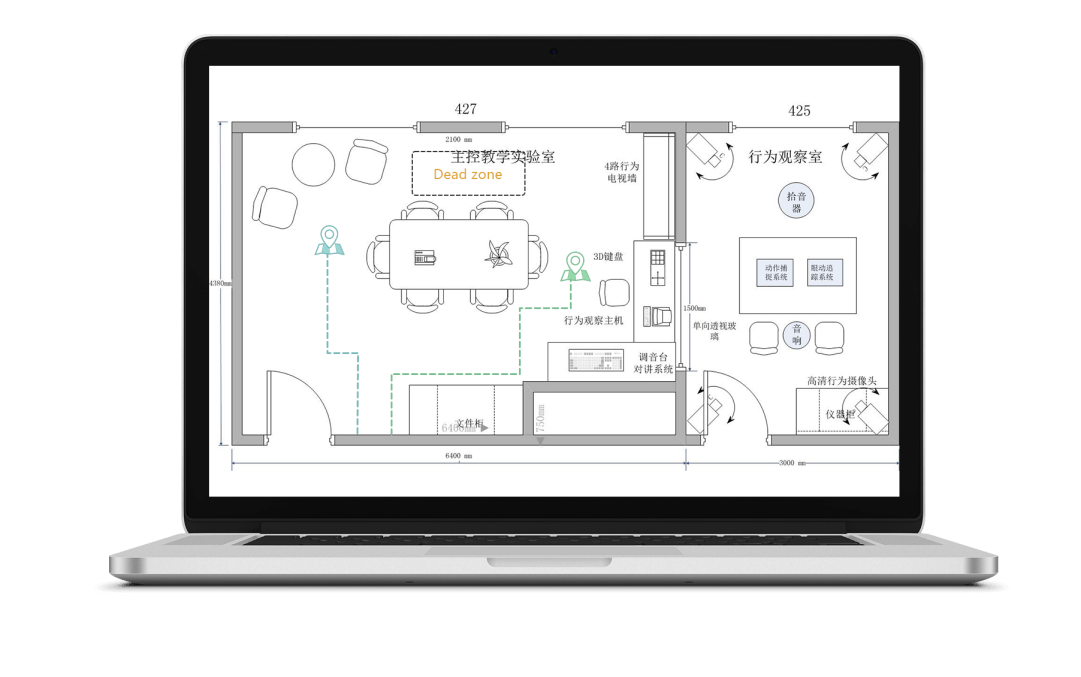
空間定位系統支持多類型的時空數據采集,包括室內空間位置追蹤、虛擬現實場景空間位置追蹤以及真實現場環境的空間位置追蹤。研究人員可以在任何環境下進行時空行為研究時,完成多維度客觀數據的實時同步采集與可視化時空分析。綜合計算機圖形圖像學、視覺設計、數據挖掘等技術,支持進行信息可視化、科學可視化與可視分析不同的層次研究。
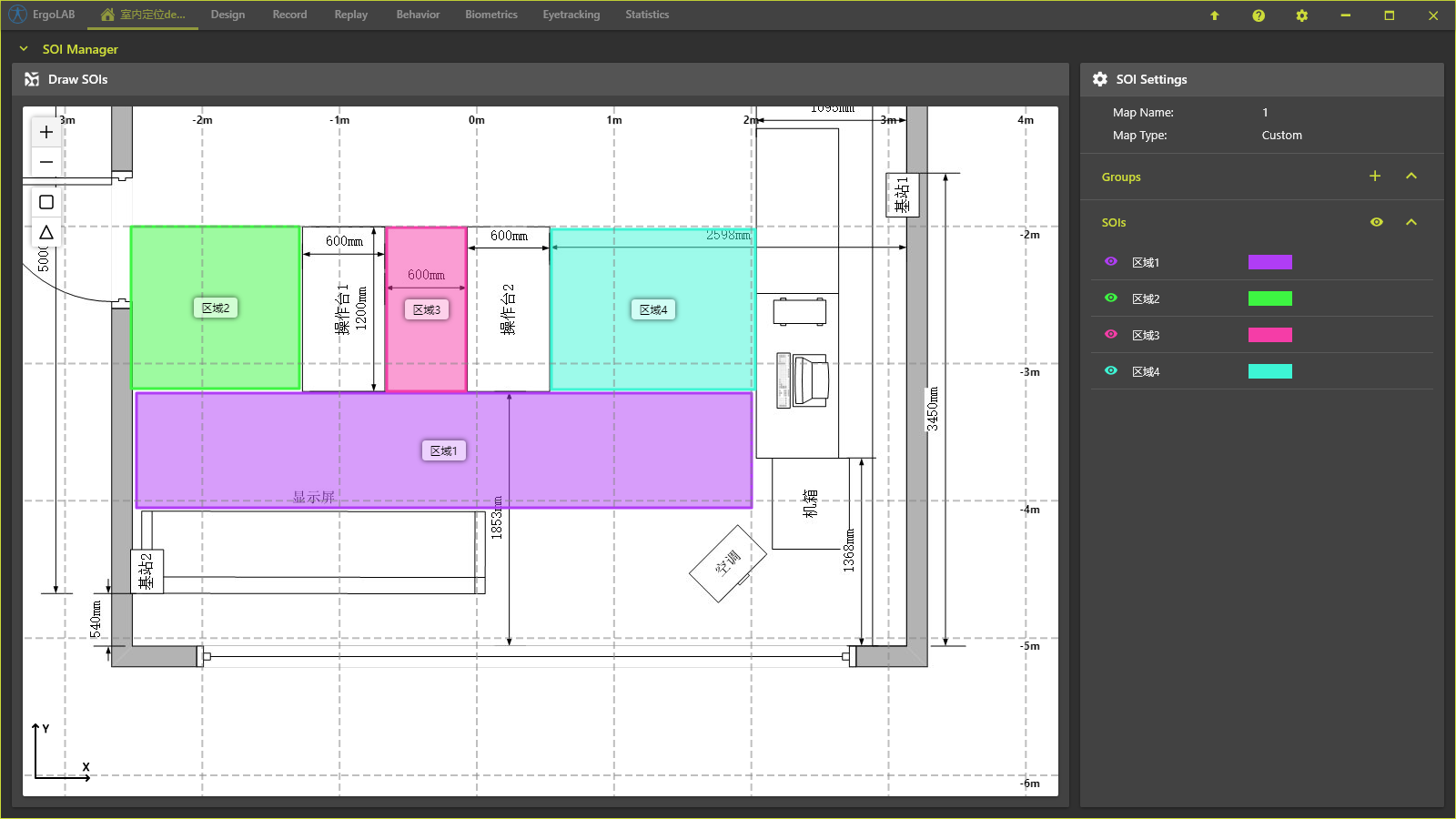
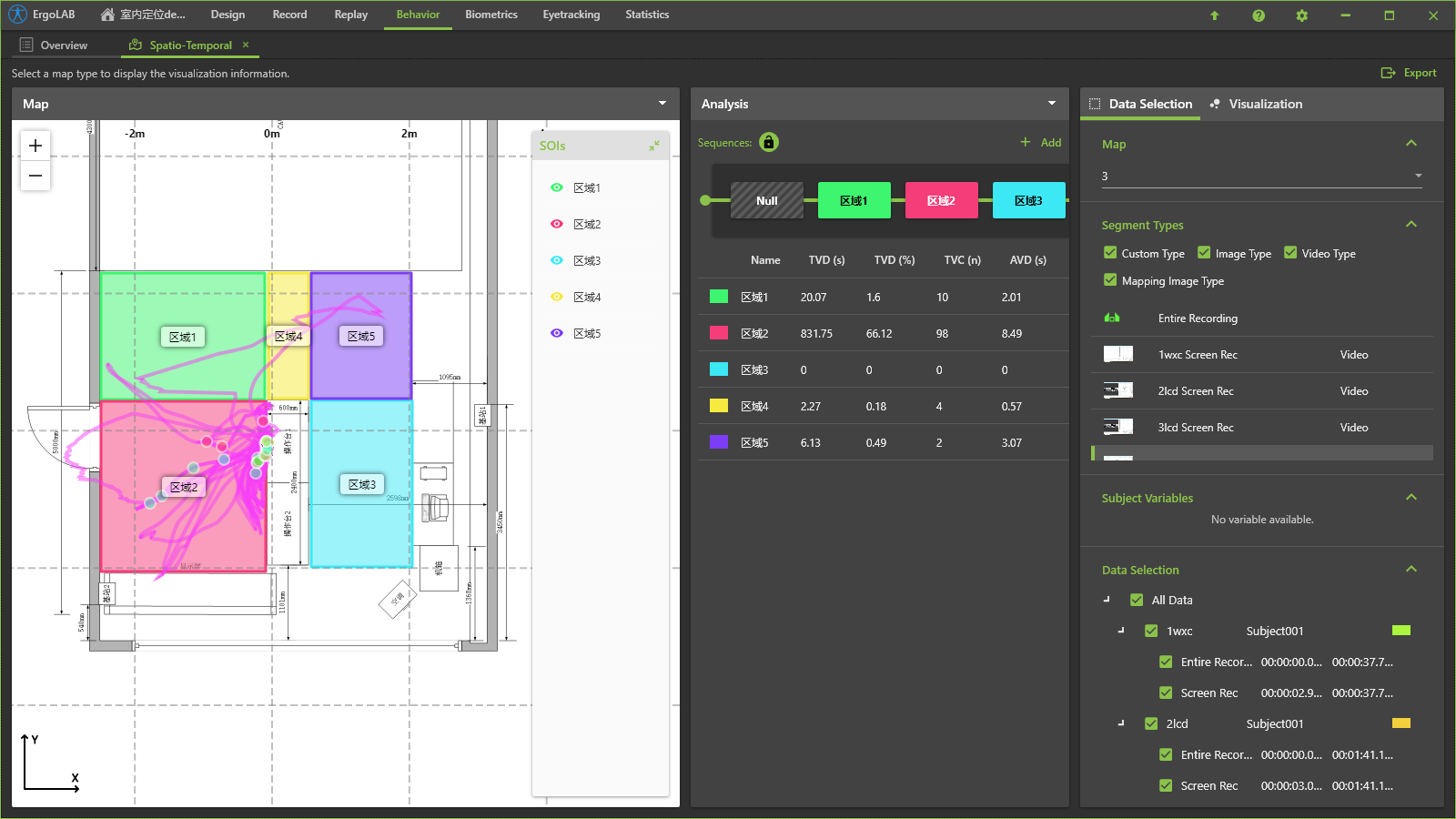
多類型時空數據采集:支持室內時空數據采集、室外時空數據采集、VR虛擬時空數據采集。自定義SOI與數據統計:可以任意編輯或時空位置作為SOI分析區域,進行數據統計。可視化人跡地圖與時空熱圖:系統任意編碼數據源均可進入時空分析進行軌跡與時空熱圖的可視化分析。多類型數據一鍵導出 :支持將所有原始數據、處理數據、編碼數據、統計圖表、可視化軌跡圖等一鍵導出。基礎定位分析與SOI統計
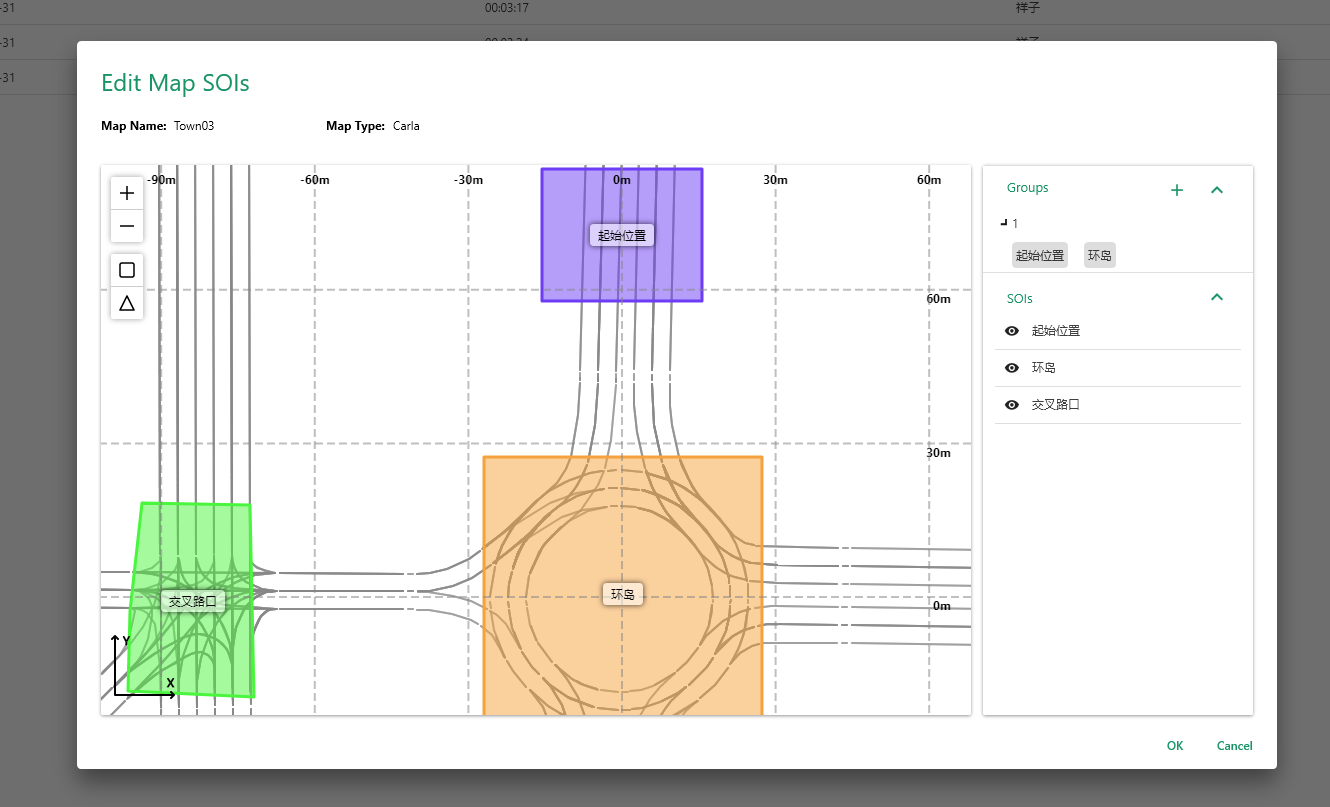
實時計算空間位置數據:系統實時計算并監測多被試的動態時空位置數據,以及個體間空間位置關系的計算信息。自定義SOI與數據統計 :根據實驗設計,系統自動識別項目中的室內空間地圖、世界地圖、VR虛擬空間地圖,在不同類型的時空地圖下,用戶可任意或編輯時空位置作為SOI分析區域,進行數據統計。SOI組與疊加分析:系統支持創建SOI Group組別或將建好的興趣區域進行歸類統計分析,支持單個被試或者多被試的軌跡數據疊加分析與數據統計。事件與時間片段統計:支持所有實時編碼與事后編碼的事件與片段進行時空可視化與數據統計分析。多類型數據一鍵導出 :支持將所有原始數據、處理數據、編碼數據、統計圖表、可視化軌跡圖等一鍵導出。
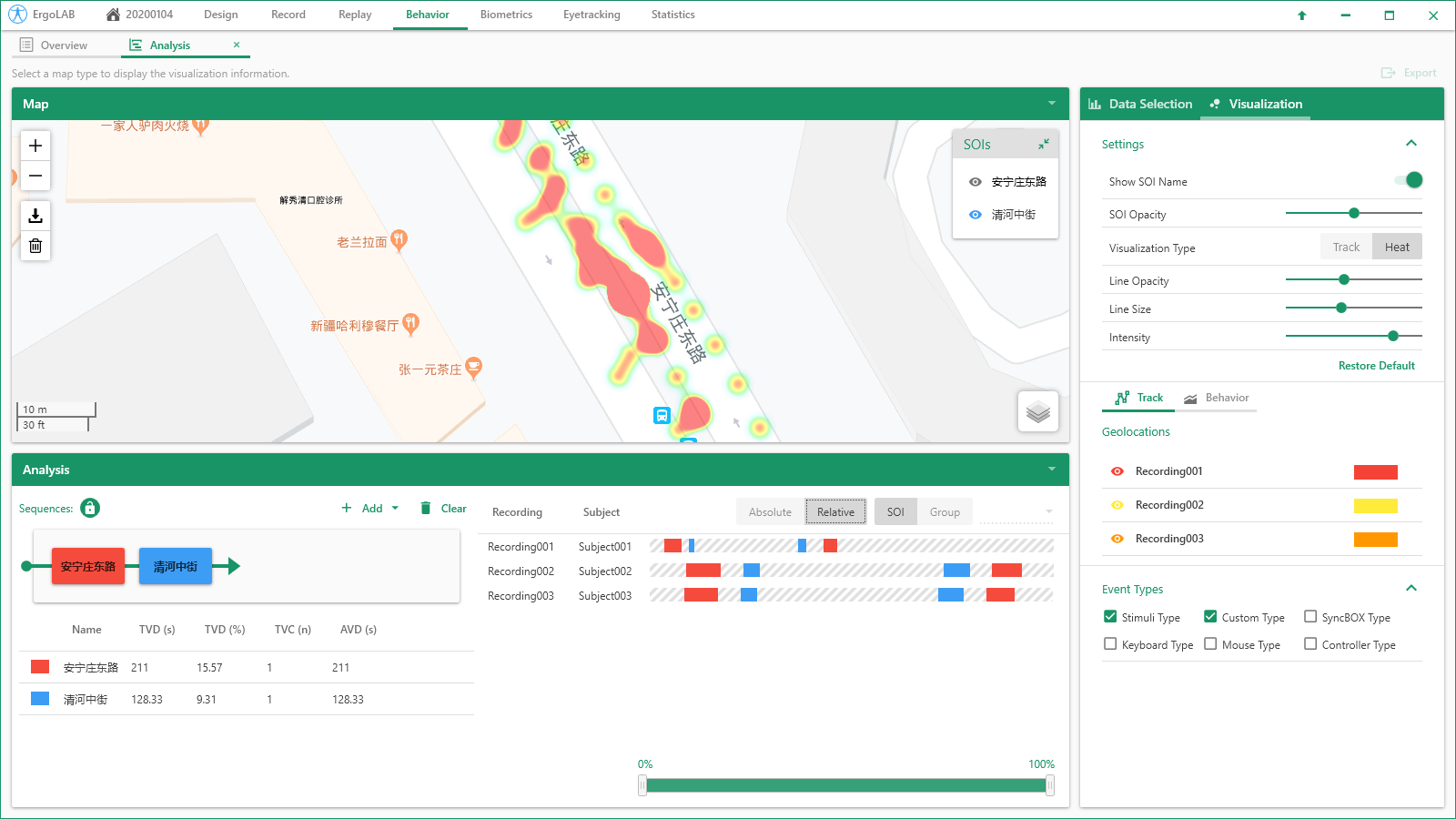
動態時空數據可視化表達
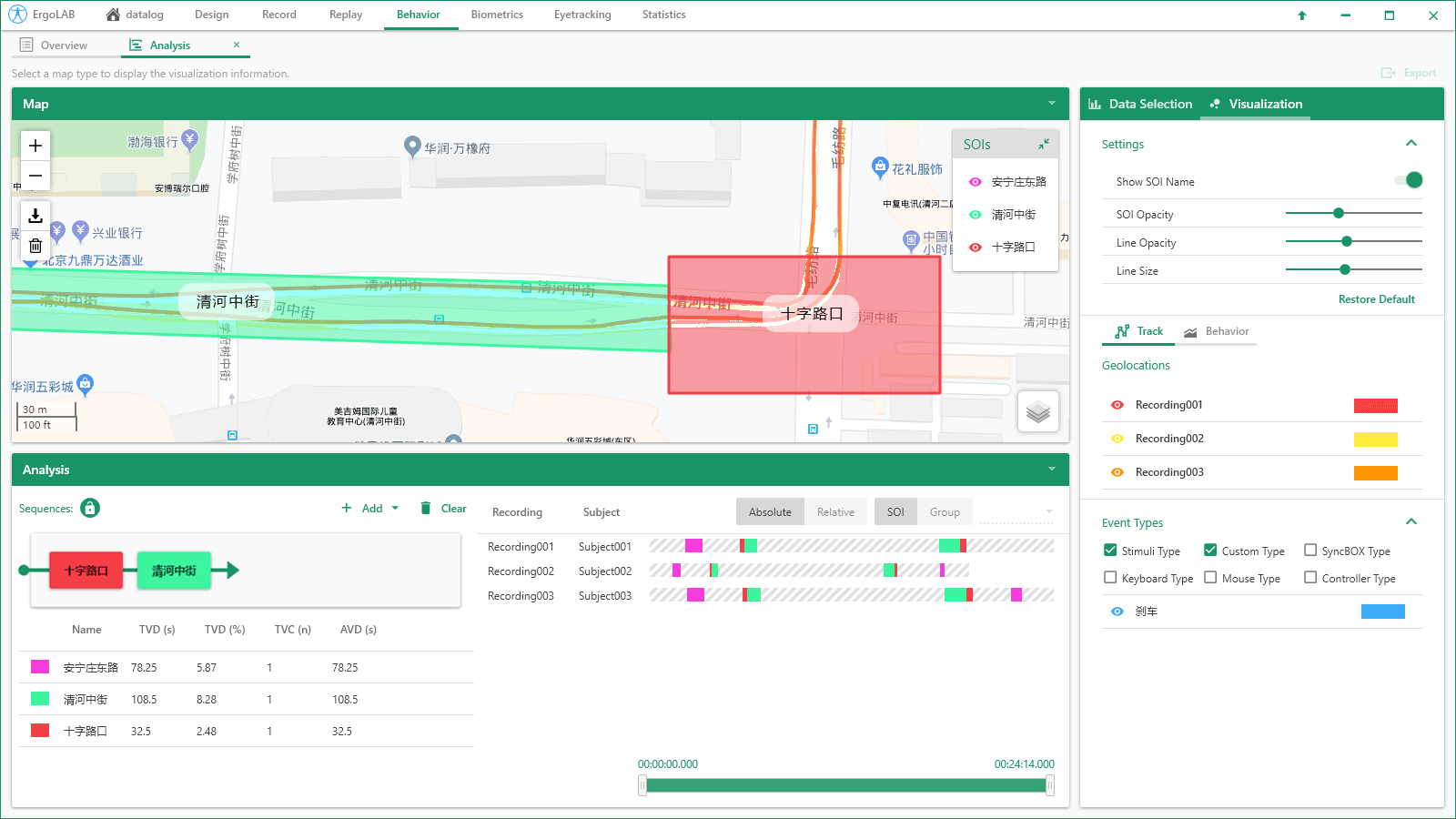
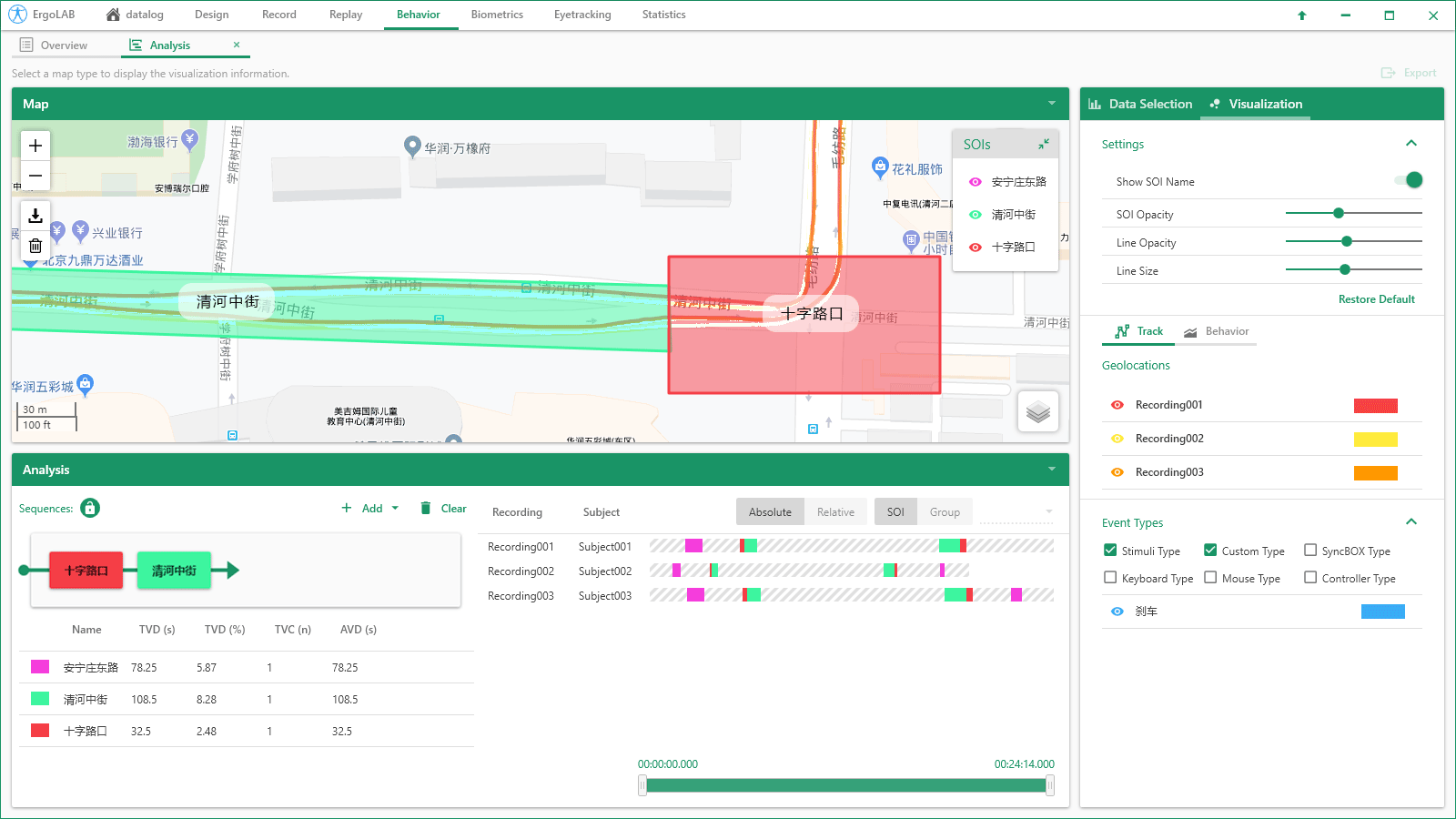
多通道數據同步時空分析 :任意ErgoLAB人機環境同步平臺采集與編碼的數據均可以作為時空分析中的數據源,如生理數據、眼動數據、行為數據等,進行可視化時空熱圖與數據分析。可視化時空熱圖:系統提供不同類型的熱圖以可視化個體位置偏好行為,通過停留時間、停留次數等指標來可視化用戶的時空數據行為。采用數據可視化的方法對時空數據進行分析和可視化展示,呈現和分析城市道路、建筑環境、室內空間等局部結構和交通狀況。可視化行走軌跡:不同被試以不同顏色的行走軌跡圖形進行可視化呈現,可直觀分析不同被試的運動軌跡與交互區域,以及實時的位置關系信息。多類型事件標記:支持所有Event事件在時空軌跡地圖中可視化呈現與分析。包括刺激事件、自定義事件、鍵盤事件、鼠標事件以及VR虛擬環境下的手柄觸發事件。SOI可視化序列性分析:支持時空數據的序列性分析,分析進入一個興趣區域發生在進入另一個興趣區域之后/之前的可視化序列相關性分析,并一鍵導出行為發生的可視化序列性分析報告。
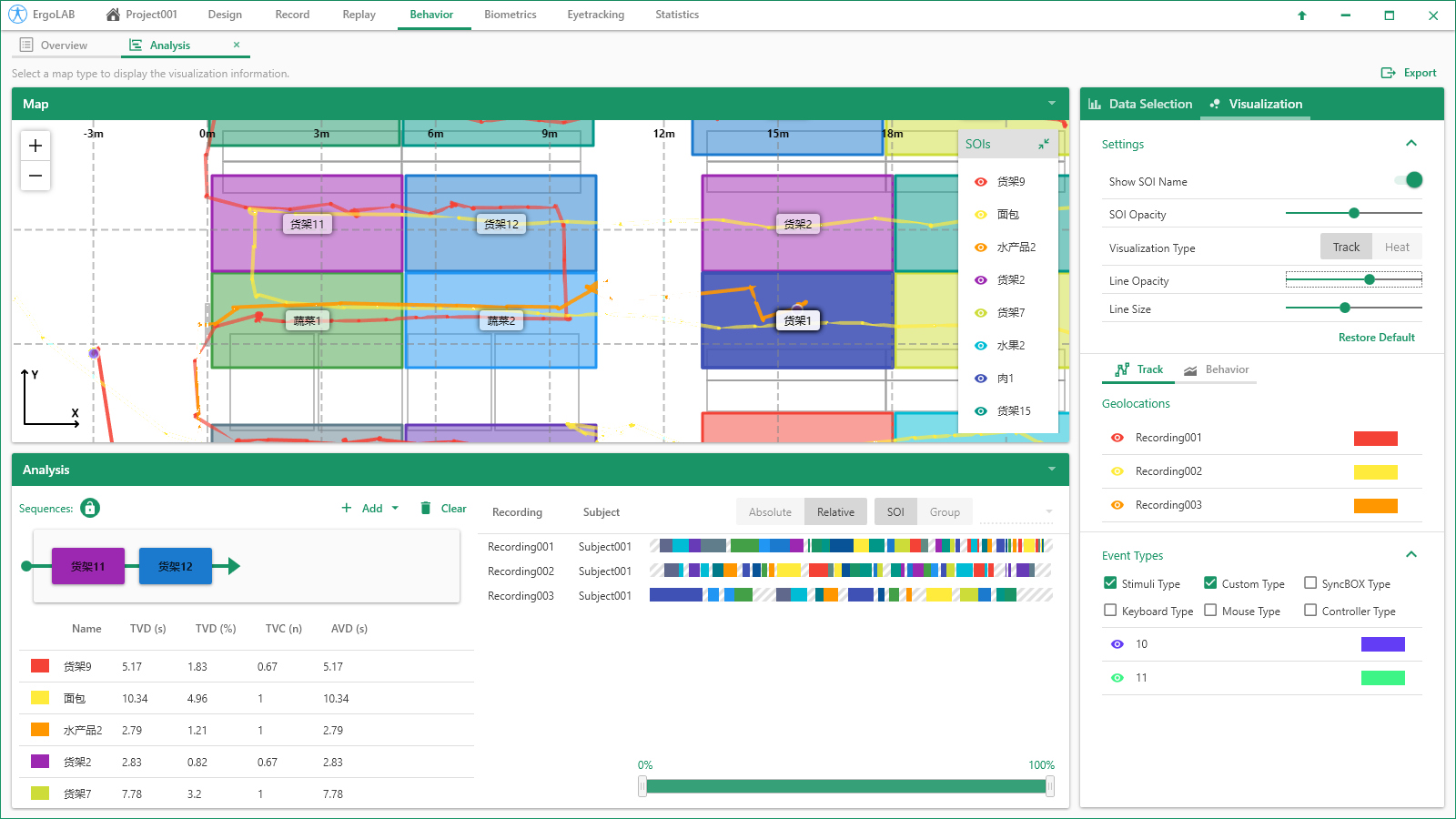
可視化Behavior時空分析
任意編碼數據源的可視化分析與統計:系統支持同步采集的眼動數據、生理數據、行為數據、駕駛數據、表情數據、動作姿態數據等各種行為編碼數據的時空分析。支持統計soi興趣區域內發生的行為統計,包含在興趣區域內的行為名稱、發生次數、每分鐘發生的次數、總持續時間、最小持續時間、最大持續時間、平均持續時間等指標。多樣性的統計指標:計算統計進入每個SOI興趣區域的興趣區域名稱、興趣區域停留的總時間、興趣區域內停留時間占總時間的百分比、進入興趣區域的總次數以及在興趣區域停留的平均時間等數據指標。時空多維度數據綜合統計
多通道數據時空分析 :任意ErgoLAB人機環境同步平臺采集與編碼的數據均可以作為時空分析中的數據源,如生理數據、眼動數據、行為數據等,進行可視化時空熱圖與SOI數據統計。綜合統計模塊數據分析:基于多維度人機環境時空數據同步技術,綜合統計模塊支持項目中采集的任意人機環境時空數據源進行交叉統計分析。如基于時間同步的眼動數據、行為數據、生理數據。實現時間軸數據的交集可視化、多維度數據的綜合統計。多層次的數據篩選與交叉分析:可以基于條件與結果進行數據篩選、基于被試屬性的交叉分析、基于客觀測試結果的交叉分析、基于主觀測試結果的交叉分析,進一步實現多維度數據的對比與可視化統計。
ErgoLAB人機環境同步云平臺可人-機-環境多維度數據的同步采集與綜合分析,包括眼動追蹤、生理測量、生物力學、腦電、腦成像、行為、人機交互、動作姿態、面部表情、主觀評 價、時空行為、模擬器、物理環境等,為科學研究及應用提供完整的數據指標。平臺可完成完整的實驗和測評流程,包括項目管理-試驗設計-同步采集-信號處理-數據分析-人工智能應用-可視化報告,支持基于云架構技術的團體測試和大數據云管理。

















 掃一掃,關注微信
掃一掃,關注微信